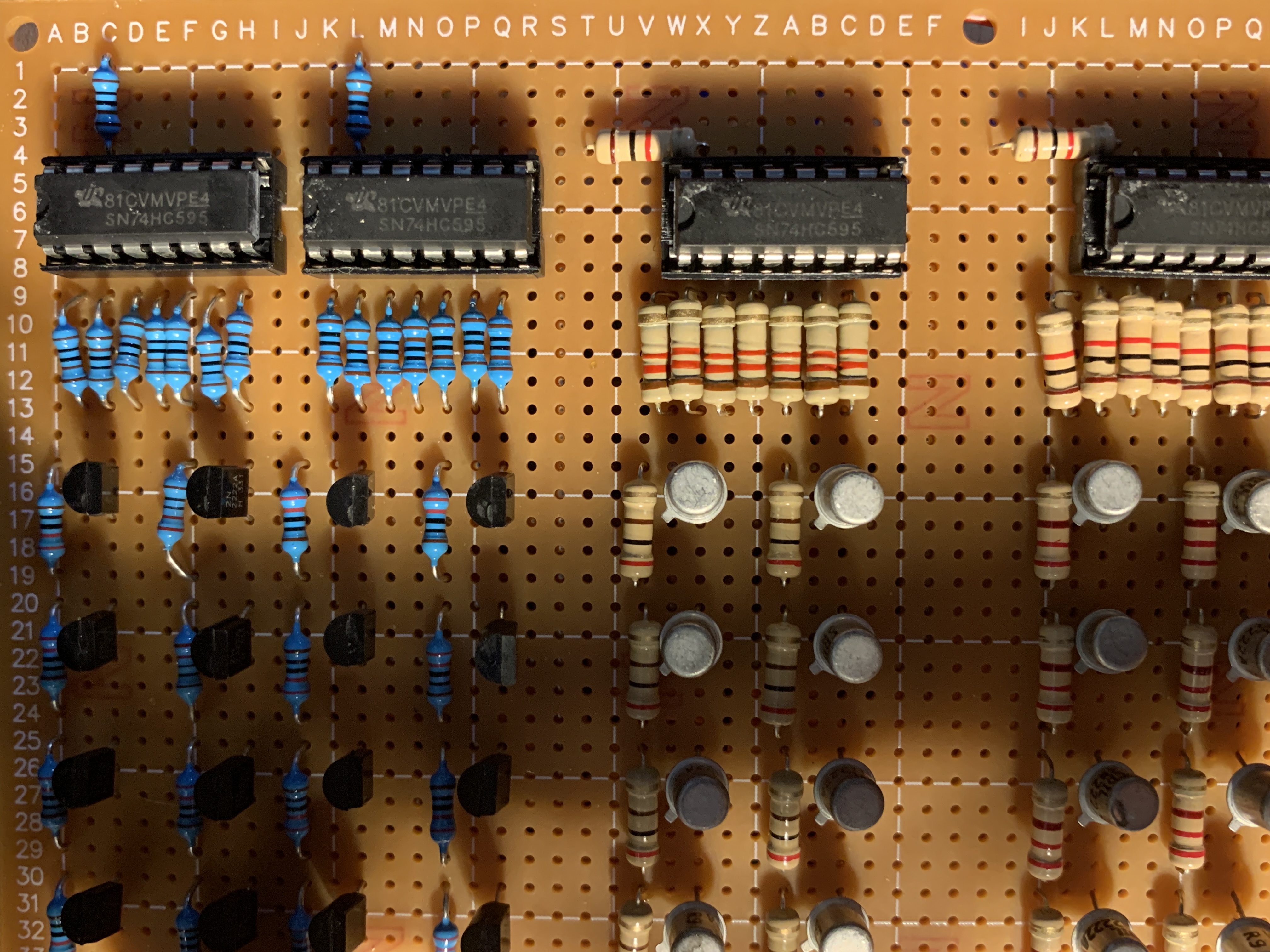
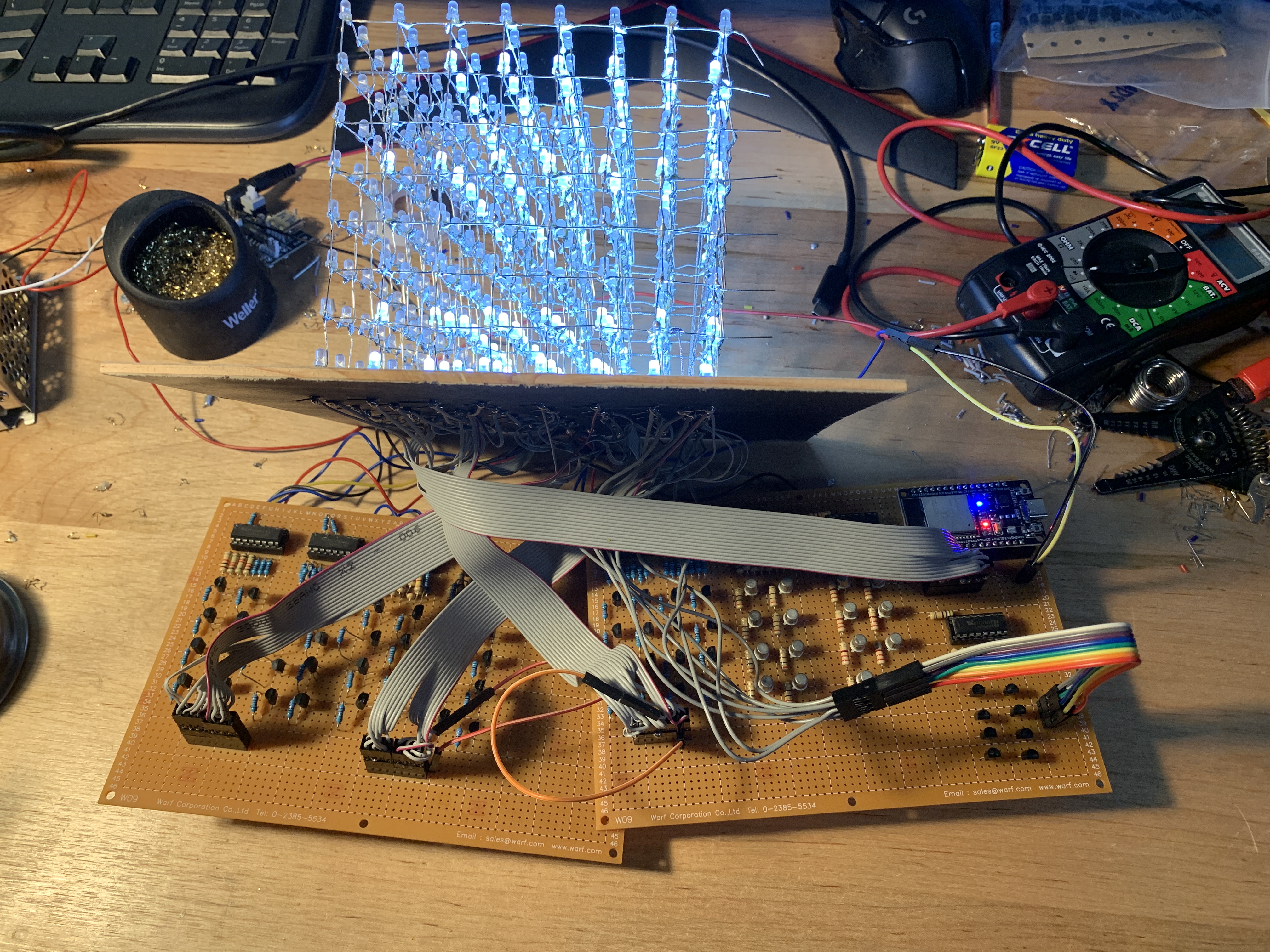
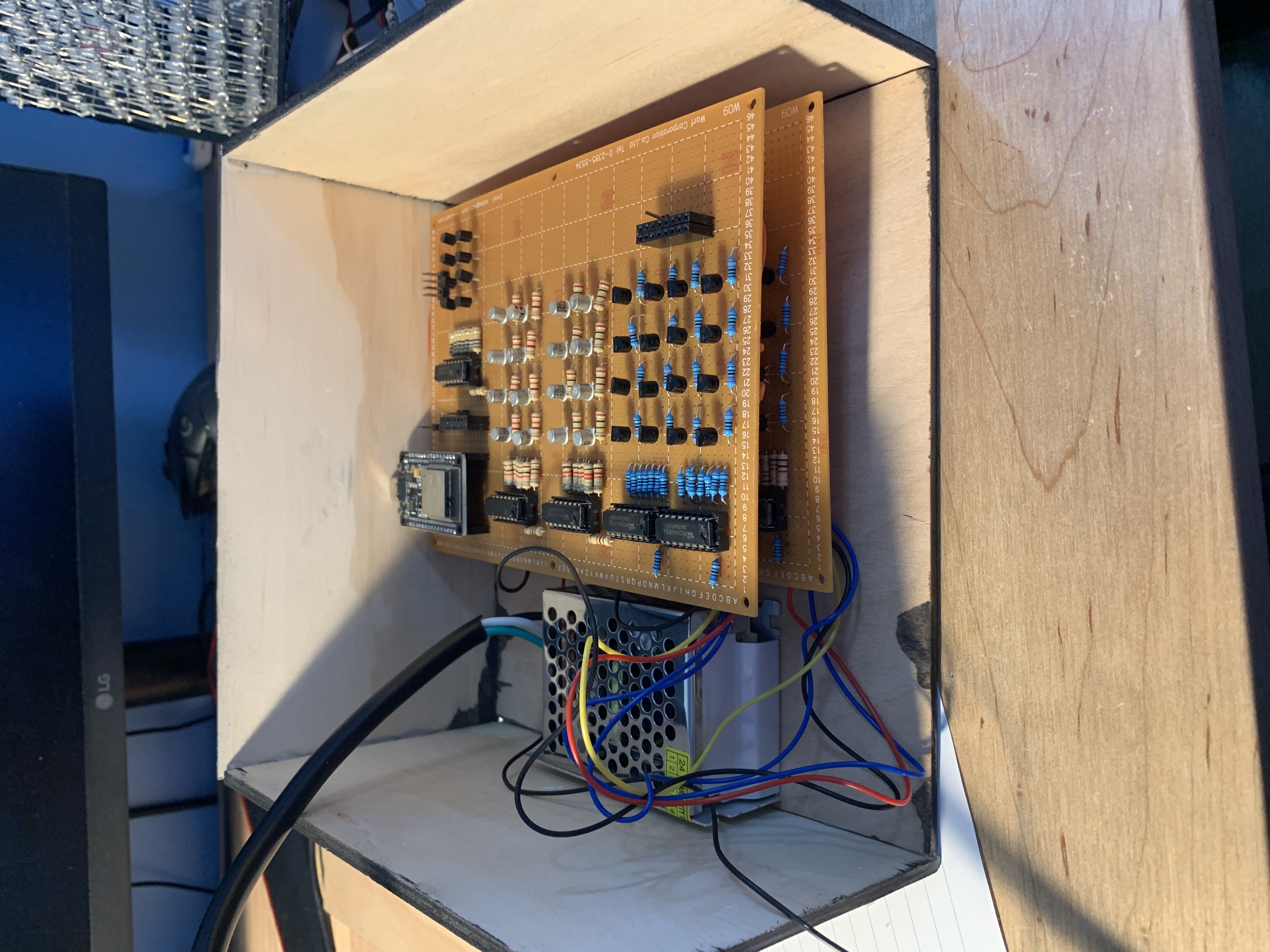
Soldered 512 LEDs into cube shape and created
controller using ESP32, and 9 74HC595 shift
registers to control 72 transistors, allowing
an external 5V DC power supply to power each LED
on or off
Soldered components to prototype PCBs and connected
to the cube with ribbon cable
Wrote low-level firmware that uses multiplexing to
achieve efficient control over each individual LED
based on its coordinate position.
Programmed several cube animations using tools like
queues to control sequential falling of "rain drops"
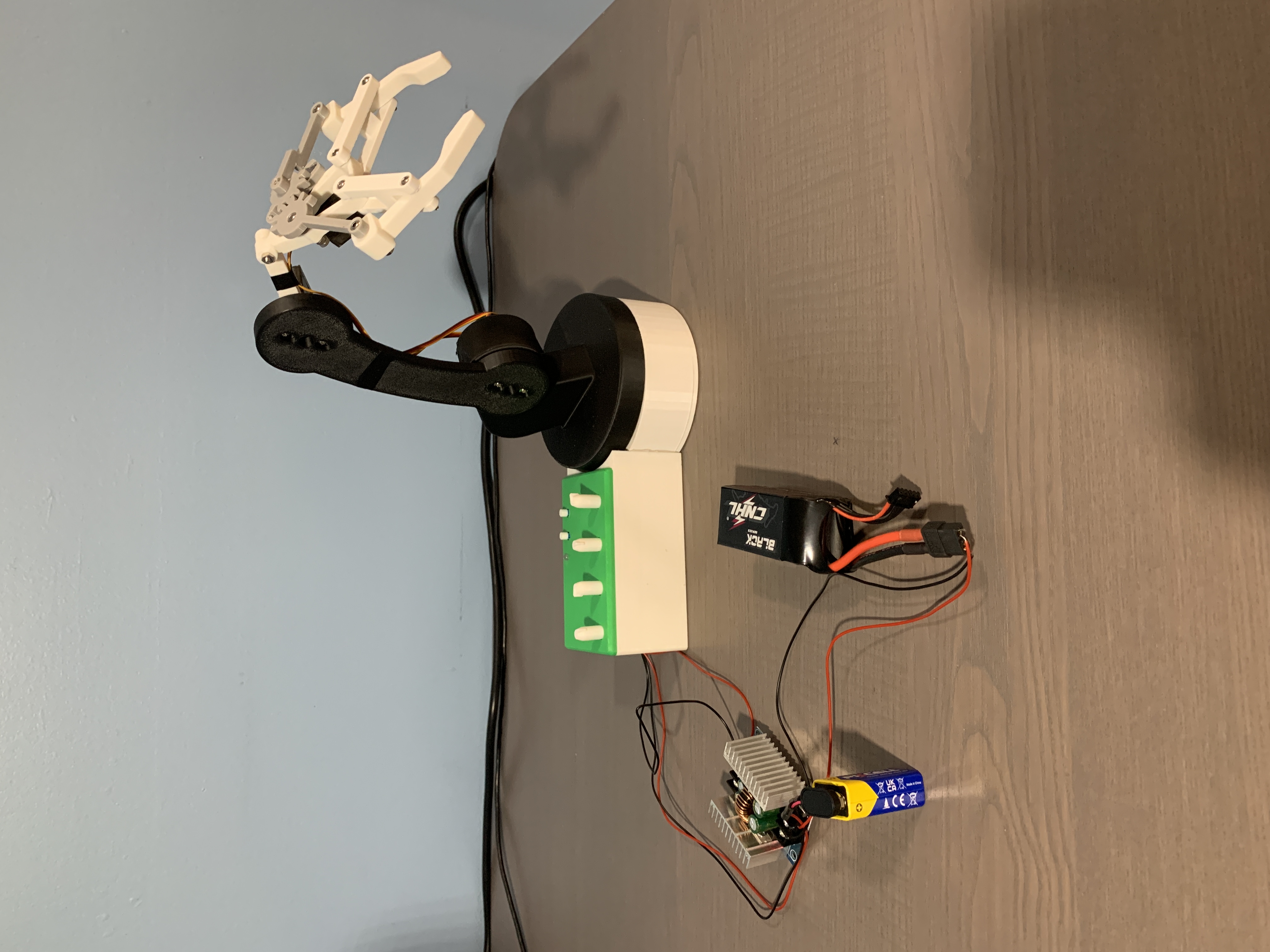
Robot Arm
Designed 3 DOF robotic arm and controller case
using Solidworks, and assembled it using MG90 servos,
MG996R servos, and potentiometers controlled by
an Arduino Uno
Completed several design iterations to create a functional robot arm
Soldered custom PCB to connect circuitry
Implemented a queue to provide record/playback functionality
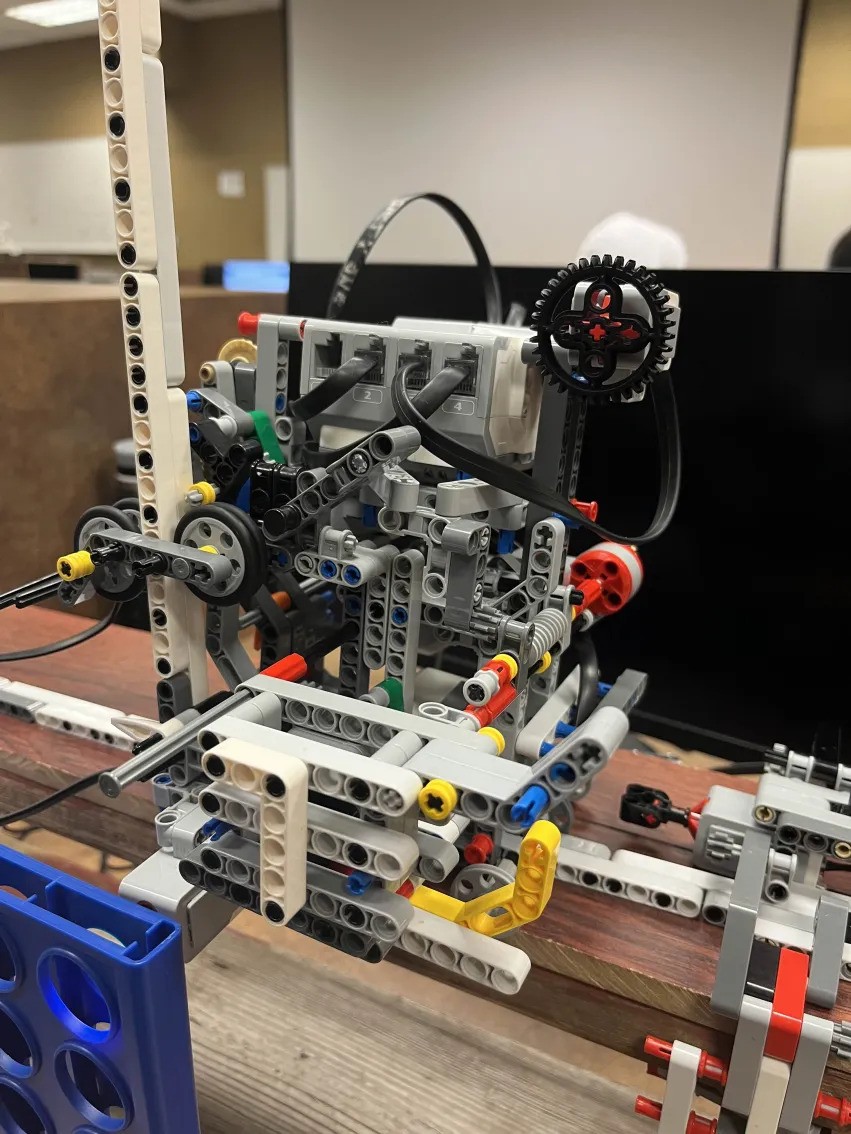
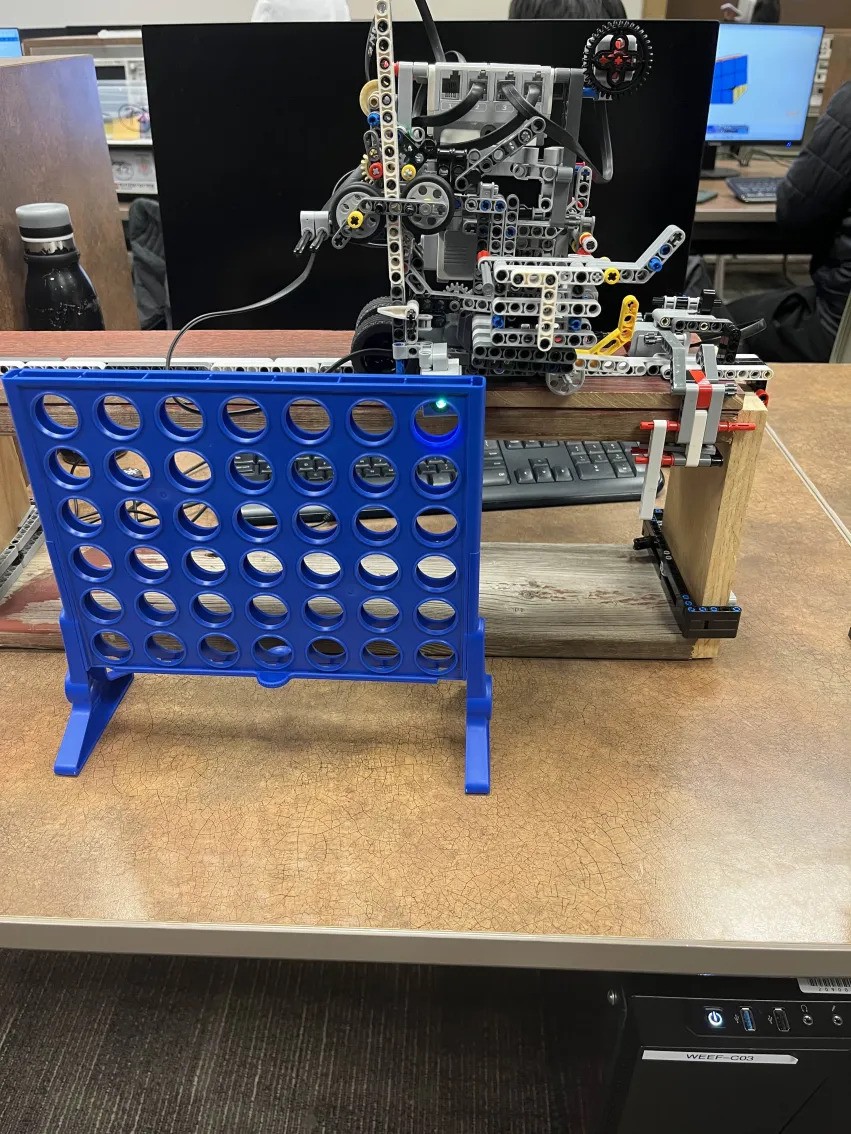
Connect 4 Playing Robot
Designed and programmed a robot using LEGO Mindstorms
components and LEGO EV3 brick to hold Connect 4 tokens
Read the state of a Connect 4 board, and move around to play
the game
Designed mechanisms for movement, token dropping, and color
sensor operation
Collaborated with a team of four, and distributed programming
tasks to create a RobotC program that could control the robot
and make smart decisions about where to play
Used 2D arrays extensively to create an algorithm from scratch
that could decide what the best move is based on the current state
of the board
Presented ideas in formal presentation, and communicated the prototype
in a technical report
Tourist Information Provider
Raspberry Pi 4 + camera providing real-time foreign
text translation and image recognition of popular landmarks
Flask front end allows users to choose between text
translation and image recognition
Live camera feed captures images of popular landmarks,
which is identified by OpenCV, and then Google Gemini provides an
informative read-out using Google Cloud Text-to-Speech API
Text translate feature uses OpenCV to read text, Google Cloud
Translate and Text-to-Speech to read it out loud
FPV Drone
Soldered necessary components to flight controller and assembled body
of drone
Installed and configured firmware on flight controller using Betaflight,
tuned motors with PID control and adjusted settings to optimize flight
performance
Successfully performed RC transmitter and receiver binding, and adjusted
various controller settings
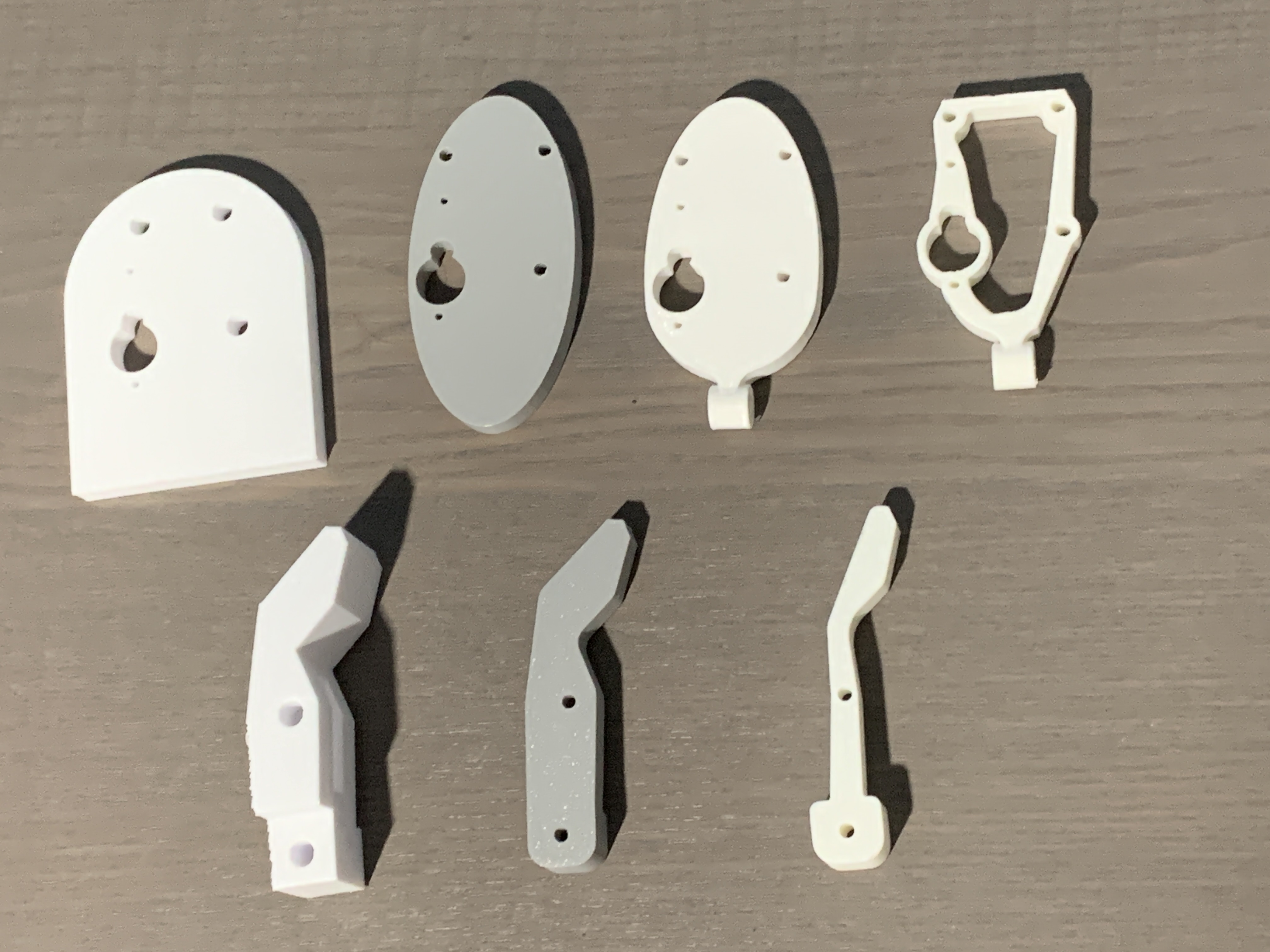
MedicArm
3D printed modular robotic arm with MG966R and MG90S servo motors.
Implemented Google Speech Recognition API
to receive input and used IBM Watson TTS
service for intelligent replies
Facilitated MongoDB database to add and edit
customer user-defined commands to control
arm movement
Utilized serial communication between Arduino
and Raspberry Pi 5 to integrate AI model with
mechanical control
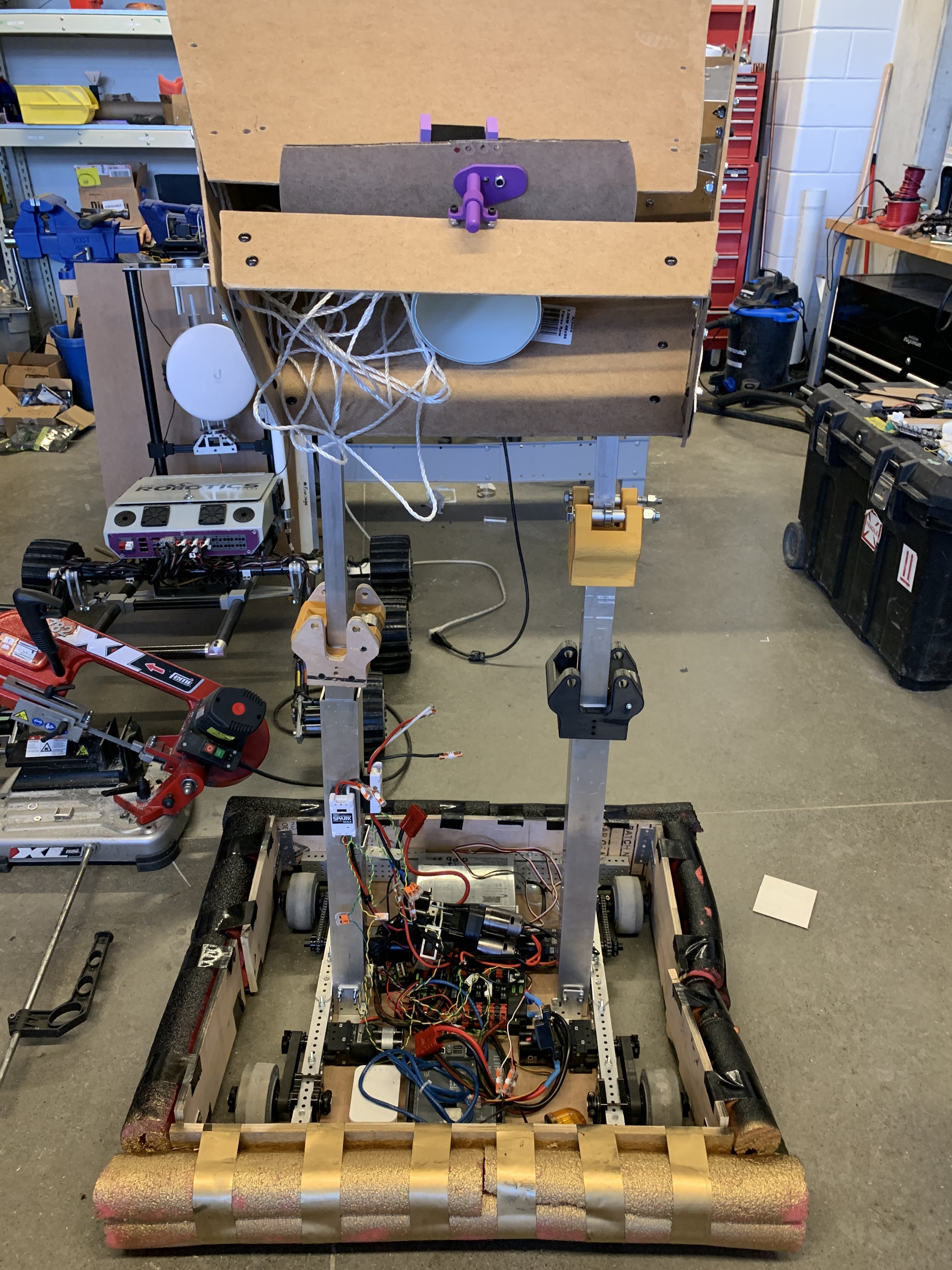
RI3D (Robot in 3 Days) Chassis
Aided with assembly of robot made to complete FIRST
Robotics competition game for 2025
Assembled drive train and arm mechanism for raising
and dropping game piece
Collaborated with other students and used drill press,
chain tool, and horizontal band saw, to complete a remote
controlled prototype